

Научно-технический интернет-журнал Свидетельство о регистрации Эл № ФС 77-31314
|
|
|
Главная | E-mail | 27.07.2024 |
|
|
||
| Главная страница | О журнале | Авторам | Редколлегия | Контакты | ||
|
|
||
|
Научно-технический интернет-журнал Свидетельство о регистрации Эл № ФС 77-31314 |
||
|
Измерительные телевизионные системы
Дата публикации : 29.09.2009 | Просмотров : 1143 |
Исследование оптико-электронных систем измерения деформаций компонентов зеркальной системы полноповоротного радиотелескопа РТ 70 (Суффа) миллиметрового диапазона УДК 621.383, 535.8
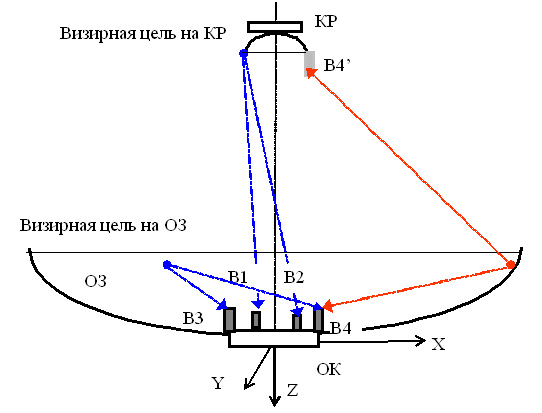
Санкт-Петербургский Государственный университет информационных технологий, механики и оптики Рассматривается оптико-электронная система контроля положения компонентов зеркальной системы радиотелескопа РТ-70 (Суффа). Приводится общий алгоритм и результаты моделирования подсистем измерения положения точки на поверхности основного зеркала и положения контррефлектора. Одним из основных направлений развития современной радиоастрономии является исследование объектов Вселенной в миллиметровом диапазоне длин волн. Освоение диапазона длин волн, занимающего промежуток между широко используемыми сантиметровым и оптическими диапазонами в радиосистемах и радиоастрономии позволит решить ряд важнейших научных проблем (вопросы формирования, физики и эволюции звезд и галактик; геодинамика и геотектоника) и практических задач (координатно-временное обеспечение научной и хозяйственной деятельности, сверхточная спутниковая и космическая навигация). В настоящее время Россией реализуется крупный проект по созданию радиообсерватории миллиметрового диапазона на плато Суффа (Узбекистан) [1]. Основным инструментом обсерватории будет полноповоротный радиотелескоп (РТ) типа РТ-70 с параметрами: основное зеркало (ОЗ) - осесимметричный фрагмент параболоида с фокусным расстоянием 21 метр, составленный из 1200 отражающих щитов; диаметр ОЗ - 70 метров; диаметр контррефлектора (КР) - 3 метра (рис. 1). Особенностью РТ как средства исследований в миллиметровом диапазоне длин волн являются высокие требования к качеству параболической поверхности ОЗ (среднее квадратическое отклонение точек поверхности от теоретического параболоида не более 0,05 мм), стабильности взаимного расположения основного зеркала ОЗ и КР (соответственно 0,08 мм). Вместе с тем многотонный вес, температурные изменения приводят к деформациям элементов конструкции РТ: нарастающим линейным смещениям точек поверхности ОЗ, достигающим в краевой зоне величины 30 мм, смещению КР относительно оси ОЗ на величину до 60 мм. Для достижения требуемых параметров отражающих элементов РТ необходимо использовать системы адаптации поверхности ОЗ и подстройки положения КР, оснащенные электромеханической системой коррекции возникающих деформаций.
Предварительные исследования на компьютерных моделях подтвердили возможность реализации ОЭС с требуемыми параметрами. Основные результаты изложены в ранее опубликованной в журнале "Теле Фото Техника" (http://www.telephototech.ru/kat_podr.php?stid=9&st_gr_id=5) [2]. Анализ результатов моделирования показал, что оптимальным по критерию минимизации общей погрешности измерения положения компонентов зеркальной системы РТ 70 (Суффа) является размещение всех приемных элементов ОЭС (Рис. 2 ) на жестком элементе конструкции - опорном кольце (ОК) в вершине ОЗ [3]. Фактически используются две отдельные подсистемы: измерения координат точек поверхности ОЗ (ИПОЗ) и измерения положения КР (ИПКР). Измерительные каналы каждой подсистемы определяют координаты визирных целей, размещенных в контрольных точках, соответственно, ОЗ и КР (обозначены синим цветом), относительно опорного кольца как промежуточной базы. Первоначально предполагалось для каждого измерительного канала подсистемы ИПОЗ вторую видеокамеру разместить на КР (ход лучей от визирных целей обозначен на рис. 2 красным цветом). Однако компьютерное моделирование измерительного канала показало, что погрешность базы между видеокамерами канала (фактически, расстояния от КР до ОК) является одной из сильно влияющих составляющих общей погрешности измерения [2]. Следовательно, общая погрешность измерения подсистемы ИПОЗ будет в качестве составляющей непосредственно включать погрешность измерения подсистемы ИПКР, что недопустимо.
Оптико-электронные измерительные каналы каждой из двух подсистем ИКОЗ и ИПКР для измерения трех пространственных координат контролируемой точки (на поверхности ОЗ или КР) используют метод триангуляции ("угловой засечки").
Оптико-электронный измерительный канал (ОЭИК), реализующий метод "угловой засечки" включает две видеосистемы, центры входных зрачков объективов которых смещены друг относительно друга на некоторое базовое расстояние B, равное диаметру опорного кольца (6 м) (рис. 3). Координатная плоскость XOZ приборной системы координат полагается совпадающей с плоскостью опорного кольца. Видеосистемами измеряются углы визирования
 1≈µ1 и 2≈µ2) следуют условия минимизации погрешности измерения пространственного положения визирной цели (как диагонали параллелепипеда погрешностей отдельных координат): y ≈ 0 и µ1 = µ2, которые определяют расположение визирной цели в плоскости осей объективов видеосистем симметрично относительно их центров. Наименьшего значения погрешность измерения достигает при z = B/2, то есть при расположении визирной цели в вершине плоского прямого угла, образованного линиями визирования. 1≈µ1 и 2≈µ2) следуют условия минимизации погрешности измерения пространственного положения визирной цели (как диагонали параллелепипеда погрешностей отдельных координат): y ≈ 0 и µ1 = µ2, которые определяют расположение визирной цели в плоскости осей объективов видеосистем симметрично относительно их центров. Наименьшего значения погрешность измерения достигает при z = B/2, то есть при расположении визирной цели в вершине плоского прямого угла, образованного линиями визирования.
Исследования ОЭИК выполнялись на компьютерной модели по следующему алгоритму. Сначала для ряда положений точечного источника излучения (визирной цели) определяются координаты изображений на ПЗС-матрицах каждой видеосистемы.
Далее имитируется алгоритм микропроцессорной обработки видеокадров с учетом моделируемых шумов, определяются углы визирования
Моделирование выявило основные приборные составляющие погрешности измерения: погрешность вследствие отклонения фокусного расстояния объективов видеосистем от номинального значения, взаимное неравенство их фокусных расстояний, отклонения величины базы. Указанные погрешности являются систематическими и их влияние может быть устранено предварительной калибровкой сначала каждой видеосистемы, а затем и всего оптикоэлектронного измерительного канала в целом.
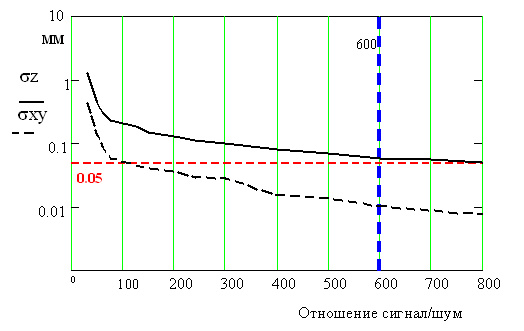
 =0.05 мм, горизонтальный маркер) достигается для смещений x,y. Погрешность измерения координаты z (по дальности) несколько превышает допустимую. =0.05 мм, горизонтальный маркер) достигается для смещений x,y. Погрешность измерения координаты z (по дальности) несколько превышает допустимую.
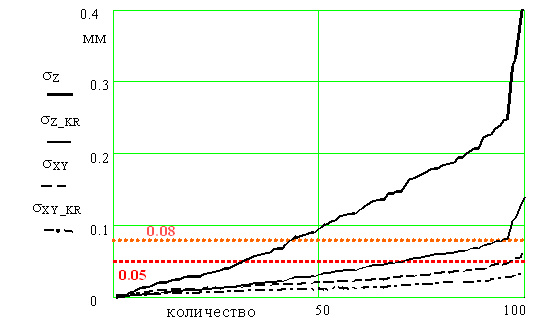
Результаты исследования для конкретных реализаций ОЭИК: ПЗС матрица SONY ICX259AL, фокусное расстояние каждого из объективов равно 450 мм показали (рис. 5), что при измерении пространственного положения КР (дистанция 22,35 м) реализуется требуемая точность измерения (среднее квадратическое значение погрешности
СПИСОК ЛИТЕРАТУРЫ
Автор(ы) : Коняхин И.А., д.т.н., проф.
Внимание ! Использование любых текстовых или графических материалов(а так-же их фрагментов) с сайта http://www.telephototech.ru возможно с разрешения администрации сайта с обязательным указанием ссылок на первоисточник и авторов статей и публикаций ! |
| ||||||||
 Содержание
Содержание
 Разделы журнала
Разделы журнала


 1,
1, 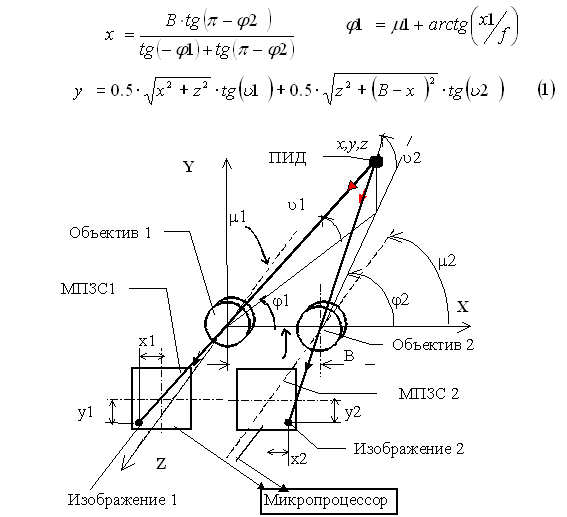


{kind=link}