

Научно-технический интернет-журнал Свидетельство о регистрации Эл № ФС 77-31314
|
|
|
Главная | E-mail | 27.07.2024 |
|
|
||
| Главная страница | О журнале | Авторам | Редколлегия | Контакты | ||
|
|
||
|
Научно-технический интернет-журнал Свидетельство о регистрации Эл № ФС 77-31314 |
||
|
Обработка цифровых фотографий
Дата публикации : 10.09.2018 | Просмотров : 3413 |
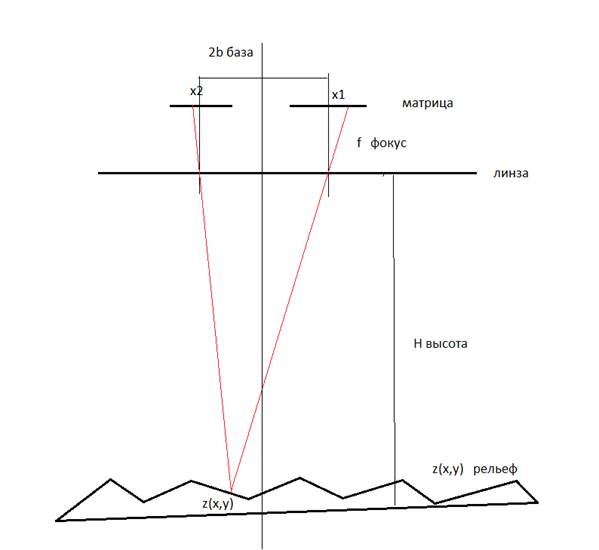
Измерение высоты с теоретически предельной точностью Предложен метод измерения высоты с теоретически предельной точностью. Недостаток метода - необходимость вычисления большого числа обратных матриц. При построении рельефа местности по двум изображениям, наиболее сложной и трудоёмкой задачей является поиск в изображениях одного и того же участка местности и построение фундаментальной матрицы. Задача значительно упрощается, если для построения рельефа используются наблюдения ТВ камеры установленной на БПЛА. Это объясняется тем, что при скорости смены кадров 25 в секунду., время кадра равно 40 мс. При скорости 100 – 150 км в час и высоте 500-1000 м. изображение местности на фотоприемнике смещается не более чем на 2 пикселя. При этом все точки смещаются примерно в одном направлении. Таким образом, поиск соответствующих точек проводится в очень малой окрестности. Более того, если провести траекторную обработку каждой точки по алгоритмам, хорошо известным в радиолокации, можно уменьшить окрестности поиска точек соответствия экстраполируя траектории точки на кадр вперед. Схематично метод наблюдения с БПЛА иллюстрируется на рис.1.
Для каждой точки местности выполняется основное уравнение эпиполярной геометрии [1] x F где x =(u,v,f) и x =(u,v,f) - координаты точки местности в плоскости первого и второго кадров, F - фундаментальная матрица размером 3х3 .[1] Определив 9 коэффициентов фундаментальной матрицы В работах [1],[2] приведен алгоритм нахождения фундаментальной матрицы. Для этого необходимо указать 8 пар точек x (
где
Решая вышеприведенную систему относительно
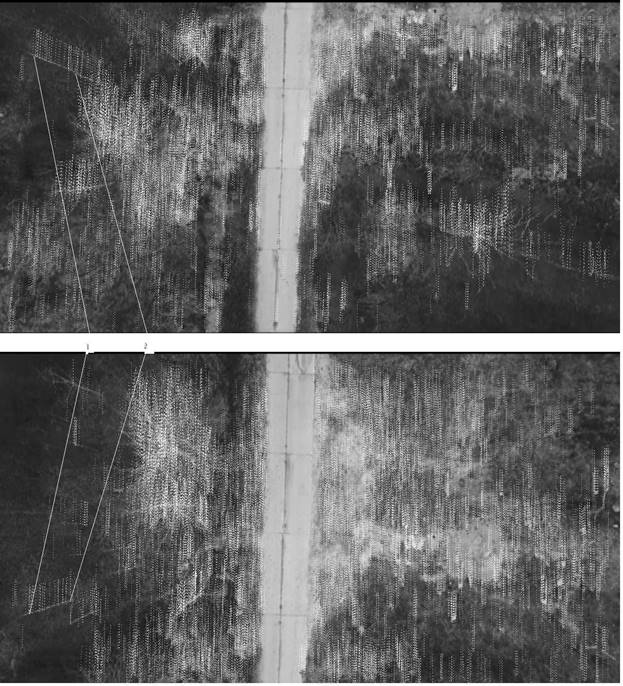
На рис.2 приведены последние 10 точек каждой траектории. Таким образом, мы нашли
Напомним, что мы измеряем высоту. Это означает, что если мы возьмем 8 пар точек на одной высоте и двигающихся с одинаковой или близкой скоростью, то определитель матрицы (2) будет равен 0 или окажется близким к нулю. В свою очередь это означает, что решения либо не будет, либо будут очень большие погрешности. Это отражает физический принцип - нельзя измерить дальность до гладкой поверхности. Если мы усредним все строки матрицы (2), то все строки станут практически одинаковыми из-за усреднения и в этом случае погрешность также будет очень большой. Поэтому мы предварительно отсортируем все траектории по длине. Матрицу (2) будем составлять по следующему принципу: 1-я траектория,
. . . Решая систему (1) получим решение Аналогично предыдущему случаю получаем: i-я траектория,
. . . Решая систему (1) получим решение Таким образом, мы получим
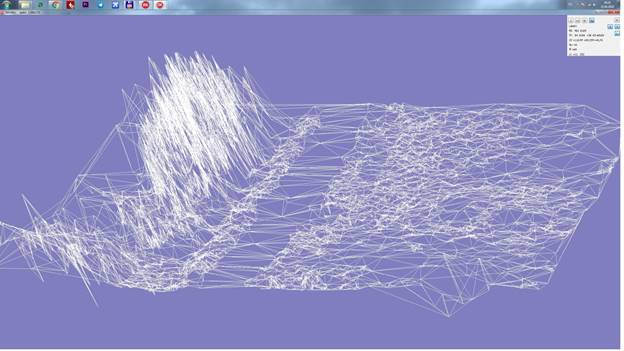
Теперь, имея коэффициенты фундаментальной матрицы, по формуле (3) мы можем построить высоты По координатам последних точек траекторий строим плоскую триангуляцию Делоне. Триангуляция Делоне выбрана потому,
что в ней максимизируется сумма минимальных углов всех треугольников, вследствие чего треугольники имеют наиболее регулярную структуру.
Вычислив высоты
Теперь, имея координаты точек (последние точки траекторий ), триангуляцию Делоне, высоты
Оценка точности измерения В работе [3] приведено подробное изложение расчета погрешности измерения в зависимости от двух компонент
Компоненты матрицы Φ - есть множители при
В нашем случае для вычисления коэффициентов фундаментальной матрицы мы имеем N траекторий. При этом все точки каждой траектории заведомо принадлежат одной точке пространства и мы можем составить N/8 систем уравнений по которым произведем усреднение. Тогда из фундаментальной работы [4] следует окончательно (неравенство Рао-Крамера):
ΔF = ( Таким образом, мы получаем теоретически минимальную погрешность измерения фундаментальной матрицы, так как при вычислении коэффициентов матрицы мы всегда берем наиболее определенную систему линейных уравнений, затем усредняем и из [4] получаем теоретически минимальную дисперсию оценки фундаментальной матрицы. Так как метод измерения высоты, изложенный в [1] является точным методом проективной геометрии, то в случае если мы бы знали фундаментальную матрицу с нулевой погрешностью, то погрешность измерения высоты была бы нулевой. Мы имеем теоретически минимальную погрешность измерения фундаментальной матрицы и, следовательно, теоретически минимальную погрешность измерения высоты.
Автор(ы) : Мартынихин А.В. Селиверстров Н.Д.
Внимание ! Использование любых текстовых или графических материалов(а так-же их фрагментов) с сайта http://www.telephototech.ru возможно с разрешения администрации сайта с обязательным указанием ссылок на первоисточник и авторов статей и публикаций ! |
| ||||||||
 Содержание
Содержание
 Разделы журнала
Разделы журнала




{kind=link}